UAV navigation at ECC19
· One min read

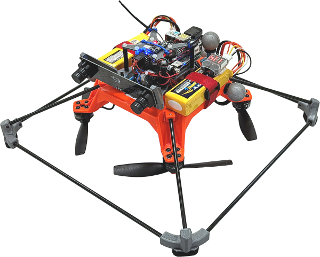
Our paper titled "Aerial navigation in obstructed environments with embedded nonlinear model predictive control" (authors: E. Small, P. Sopasakis, E. Fresk, P. Patrinos and G. Nikolakopoulos) has been accepted for publication in European Control Conference, 2019.