Examples
IMPORTANT NOTE: IN OpEn version 0.6.0 we have added support
for the augmented Lagrangian and penalty methods; this is not available through the
MATLAB interface at the moment. We would advise that the users use opengen in Python
instead. The MATLAB interface will be updated soon - stay tuned
Navigation
Problem statement
System dynamics
Assuming zero slip of the trailer wheels, the nonlinear kinematics of a ground vehicle, shown in the following figure
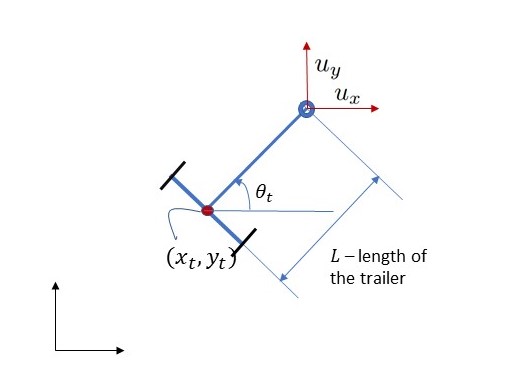
is given by the following equations
where the state vector $z=(x, y, \theta)$ comprises the coordinates $x$ and $y$ of the trailer and the heading angle $\theta$.
The input $u=(u_x, u_y)$ is a velocity reference which is tracked by a low-level controller.
The distance between the center of mass of the trailer and the fulcrum connecting to the towing vehicle is $L = 0.5\mathrm{m}$.
The system dynamics can be written concisely as
We shall discretise this system using the Euler discretization with sampling time $t_s$, that is
Cost functions
Our aim is to determine a sequence of control actions,
To this end, we define the following stage cost function
Likewise, we define the terminal cost function
We now introduce the total cost function
where the sequence of states, $z_0,\ldots, z_N$ is governed by the discrete-time dynamics stated above.
Optimal control problem
We formulate the following optimal control problem
We assume there are no active constraints on the input variables, that is $U(z_0) = \mathbb{R}^{2N}$.
Note that the sequence of states, $z_0, z_1, \ldots, z_N$, does not partipate in the problem definition in (4). This is because $z_t = z_t(z_0, u_0, \ldots, u_{t-1})$ for all $t=1,\ldots, N$. In order words, all $z_t$ are functions of $u$ and $z_0$.
Code generation in MATLAB
Firstly, we define the total cost function
% parameters
L = 0.5; ts = 0.1;
% Prediction horizon
N = 50;
% target point and bearing
xref=1; yref=1; thetaref = 0;
% weights
q = 10; qtheta = .1; r = 1;
qN = 10*q; qthetaN = 10*qtheta;
nu = 2; nx = 3;
u = casadi.SX.sym('u', nu*N);
z0 = casadi.SX.sym('z0', nx);
x = z0(1); y = z0(2); theta = z0(3);
cost = 0;
for t = 1:nu:nu*N
cost = cost + q*((x-xref)^2 + (y-yref)^2) + qtheta*(theta-thetaref)^2;
u_t = u(t:t+1);
theta_dot = (1/L)*(u_t(2)*cos(theta) - u_t(1)*sin(theta));
cost = cost + r*(u_t'*u_t);
x = x + ts * (u_t(1) + L * sin(theta) * theta_dot);
y = y + ts * (u_t(2) - L * cos(theta) * theta_dot);
theta = theta + ts * theta_dot;
end
cost = cost + qN*((x-xref)^2 + (y-yref)^2) + qthetaN*(theta-thetaref)^2;
constraints = OpEnConstraints.make_no_constraints();
We then build the parametric optimizer:
builder = OpEnOptimizerBuilder()...
.with_problem(u, z0, cost, constraints)...
.with_build_name('navigation')...
.with_build_mode('release')...
.with_fpr_tolerance(1e-4)...
.with_max_iterations(500);
optimizer = builder.build();
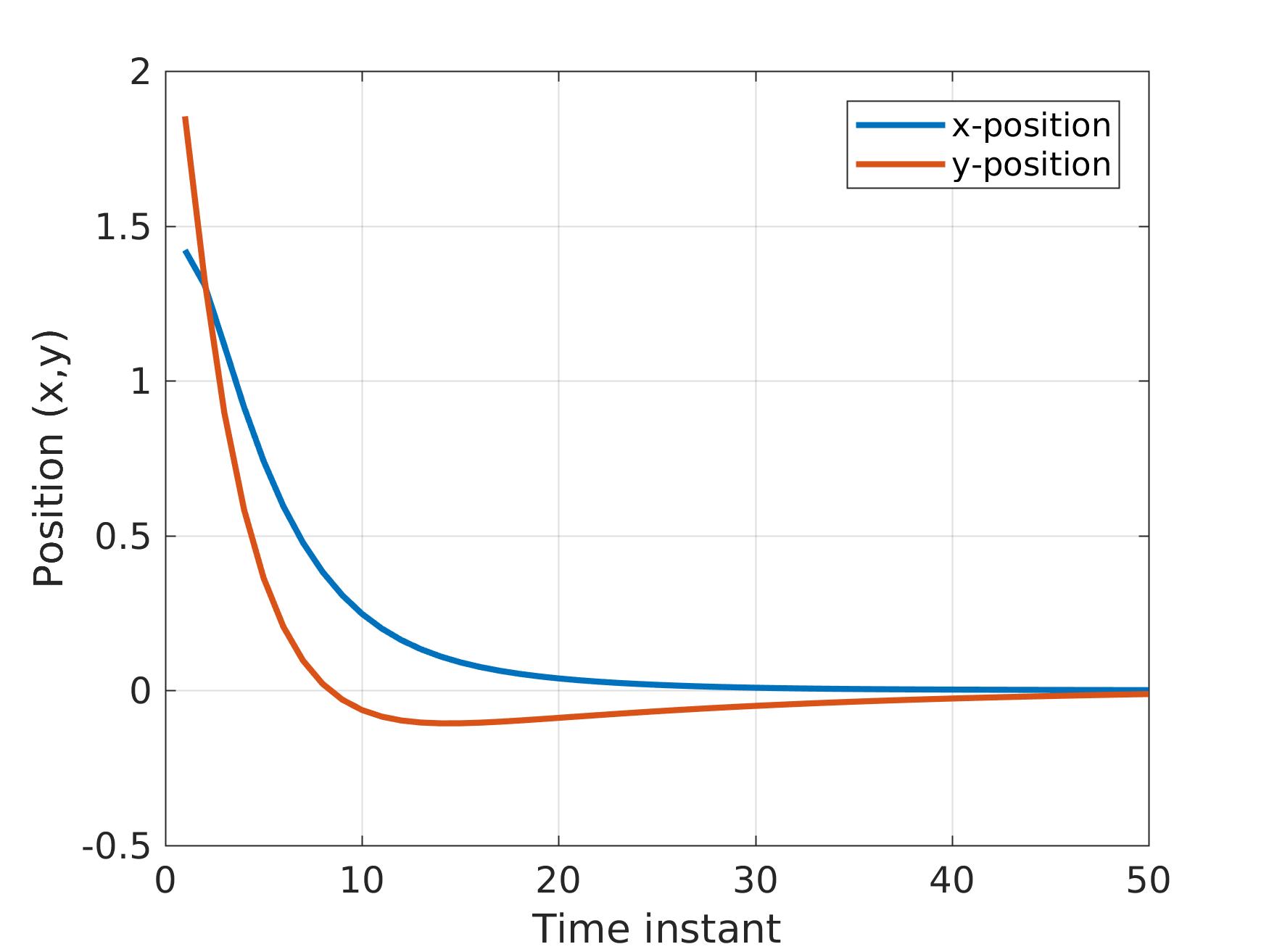
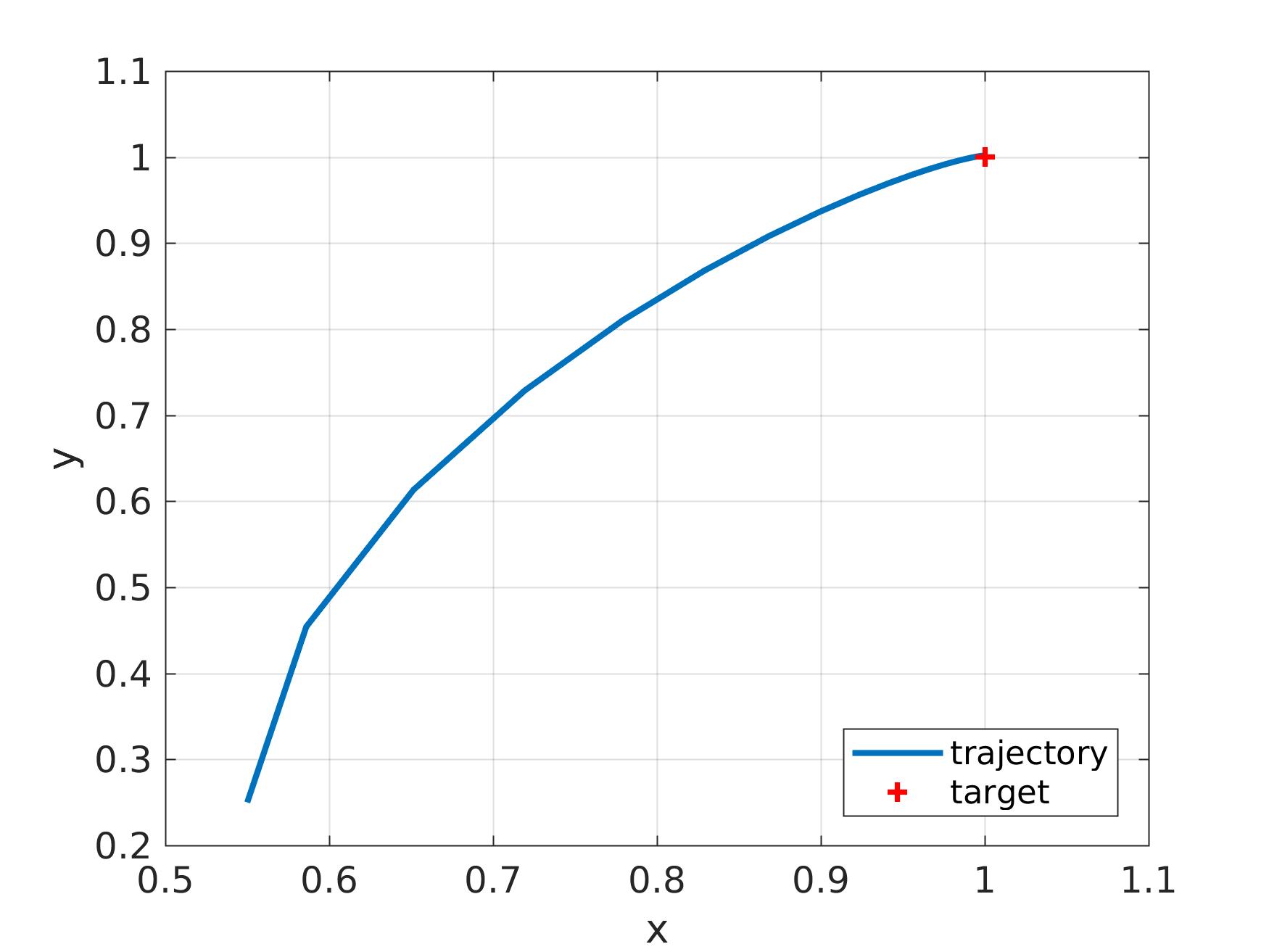
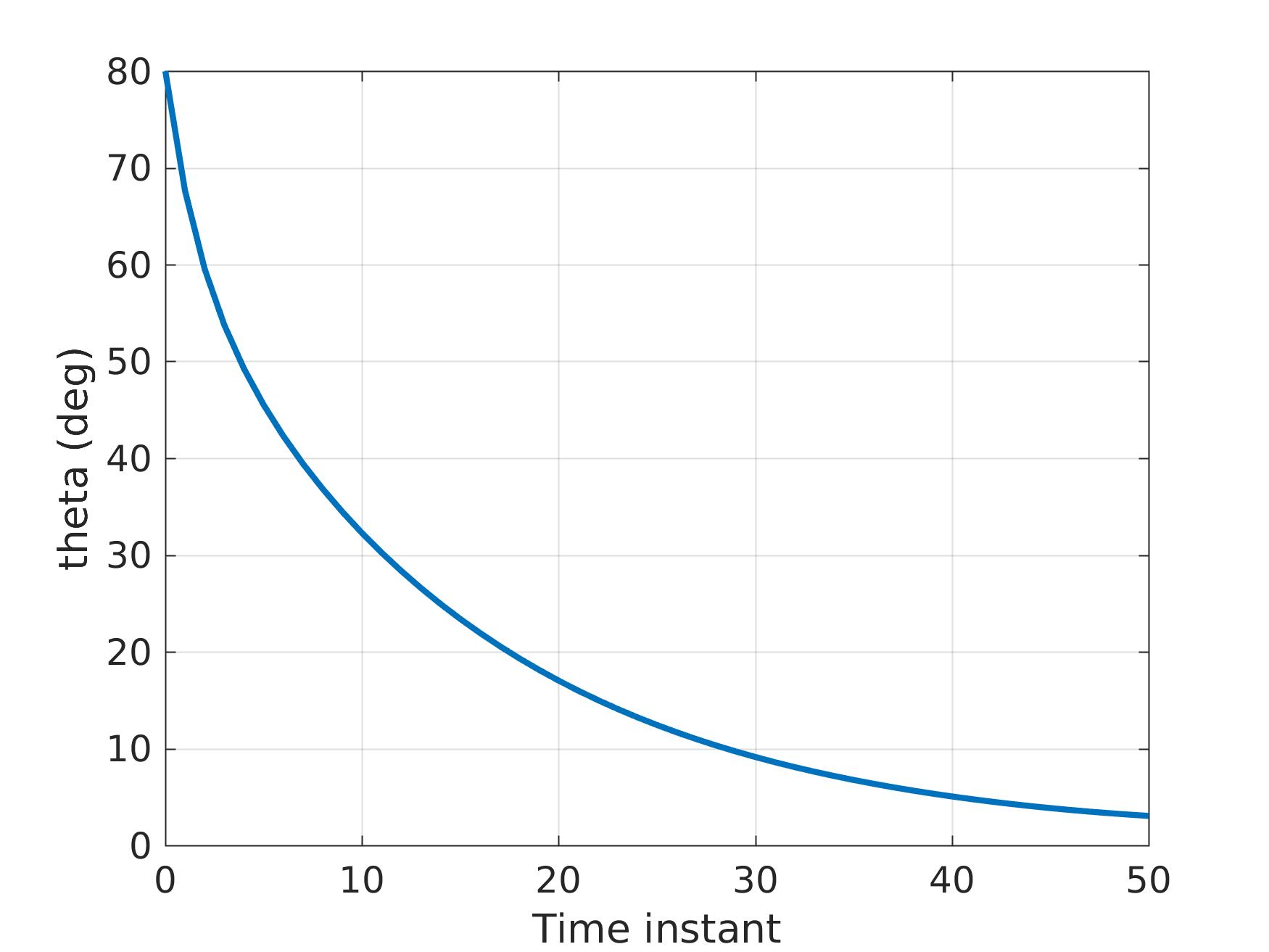
Solution
The solution is presented below (the algorithm converges in 25 iterations after 3.2ms):
Free references
Let's get a little creative!
We may define the parameter of the optimization problem to be
We will define the parameter $p$, instead of $z_0$, as follows:
p = casadi.SX.sym('p', 2*nx);
x = p(1); y = p(2); theta = p(3);
xref = p(4); yref = p(5); thetaref = p(6);
the rest of the problem definition remains the same.
The optimizer should now be called as follows:
z_init = [1.0; -0.3; deg2rad(30)];
z_ref = [1.5; 0.7; deg2rad(50)];
out = optimizer.consume([z_init; z_ref]);

Obstacle avoidance
Consider the problem of determining a minimum-cost trajectory which avoids an obstacle, $O$, which is described by
where $[x]_+ = \max\{0, x\}$ is the plus operator.
We now define the modified stage cost function
and the modified terminal cost function

For completeness, here is the modified code:
nu = 2; nx = 3;
u = casadi.SX.sym('u', nu*N);
p = casadi.SX.sym('p', 2*nx+1);
x = p(1); y = p(2); theta = p(3);
xref = p(4); yref = p(5); thetaref=p(6);
h_penalty = p(end);
cost = 0;
% Obstacle (disc centered at `zobs` with radius `c`)
c = 0.4; zobs = [0.7; 0.5];
for t = 1:nu:nu*N
z = [x; y];
cost = cost + q*norm(z-zref) + qtheta*(theta-thetaref)^2;
cost = cost + h_penalty * max(c^2 - norm(z-zobs)^2, 0)^2;
u_t = u(t:t+1);
theta_dot = (1/L)*(u_t(2)*cos(theta) - u_t(1)*sin(theta));
cost = cost + r*(u_t'*u_t);
x = x + ts * (u_t(1) + L * sin(theta) * theta_dot);
y = y + ts * (u_t(2) - L * cos(theta) * theta_dot);
theta = theta + ts * theta_dot;
end
cost = cost + qN*((x-xref)^2 + (y-yref)^2) + qthetaN*(theta-thetaref)^2;
cost = cost + h_penalty * max(c^2 - norm(z-zobs)^2, 0)^2;
##$ Experimental validation
A somewhat more involved nonlinear model predictive control (NMPC) formulation, enhanced with obstacle avoidance capabilities, was presented in ECC '18.
A short footage of our experiment is shown below:
Population dynamics
Here, we will give a complete example of designing a nonlinear model predictive controller (NMPC) using OpEn.
Let us first give the problem statement.
Control of population dynamics
Consider a Lotka-Volterra-type model, aka predator-prey-type model, with actuation $u_t$, which is described by the following system of equations
We are looking for a sequence of inputs
We chose these non-quadratic functions to demonstrate that OpEn can easily accommodate any ($C^{1,1}$-smooth) nonlinear cost function.
We therefore need to solve the following parametric optimization problem, with parameter $z_0 = (x_0, y_0)$:
We assume there are no active constraints on the input variables, that is $U(z_0) = \mathbb{R}^N$.
The following parameters are given: $\alpha = 0.6$, $\beta = 0.05$, $\gamma = 0.1$, $\eta = 0.1$, $\delta = 0.95$ and $\lambda = 0.1$.
Note that the sequence of states, $z_0, z_1, \ldots, z_N$, does not partipate in the problem definition in (4). This is because $z_t = z_t(z_0, u_0, \ldots, u_{t-1})$ for all $t=1,\ldots, N$. In order words, all $z_t$ are functions of $u$ and $z_0$.
Code generation in MATLAB
We may generate a parametric optimizer for the above optimal control problem as follows:
% Specify the parameters of the system:
alpha = 0.6; bet = 0.05; gam = 0.1;
eta = 0.1; delta = 0.95; lam = 0.1;
% Prediction horizon:
N = 20;
% Parameters of the cost functions:
q = 1.5; r = 0.1; qN = 2; mu = 3000;
xref=0.2; ylim=0.05;
u = casadi.SX.sym('u', N);
z0 = casadi.SX.sym('u', 2);
% Construct the cost function
x = z0(1); y = z0(2); cost = 0;
for t = 1:N
cost = cost + q*(x-xref)^2 + mu*max(ylim-y,0)^2+ r*u(t)^2;
x = (alpha*x - bet*x*y)/(1 + gam*x) + u(t);
y = ( delta*y - eta*x*y)/(1 + lam*y);
end
cost = cost + qN*(x-xref)^2 + mu*max(ylim-y,0)^2;
% Constraints
constraints = OpEnConstraints.make_no_constraints();
% Use OpEnOptimizerBuilder to build an optimizer
builder = OpEnOptimizerBuilder()...
.with_problem(u, z0, cost, constraints)...
.with_build_name('lotka_volterra')...
.with_fpr_tolerance(1e-8);
optimizer = builder.build();
Solution
We first need to start the parametric optimization module and connect to it (read the documentation of the MATLAB interface for details)
optimizer.run();
optimizer.connect();
We may then use the optimizer as follows:
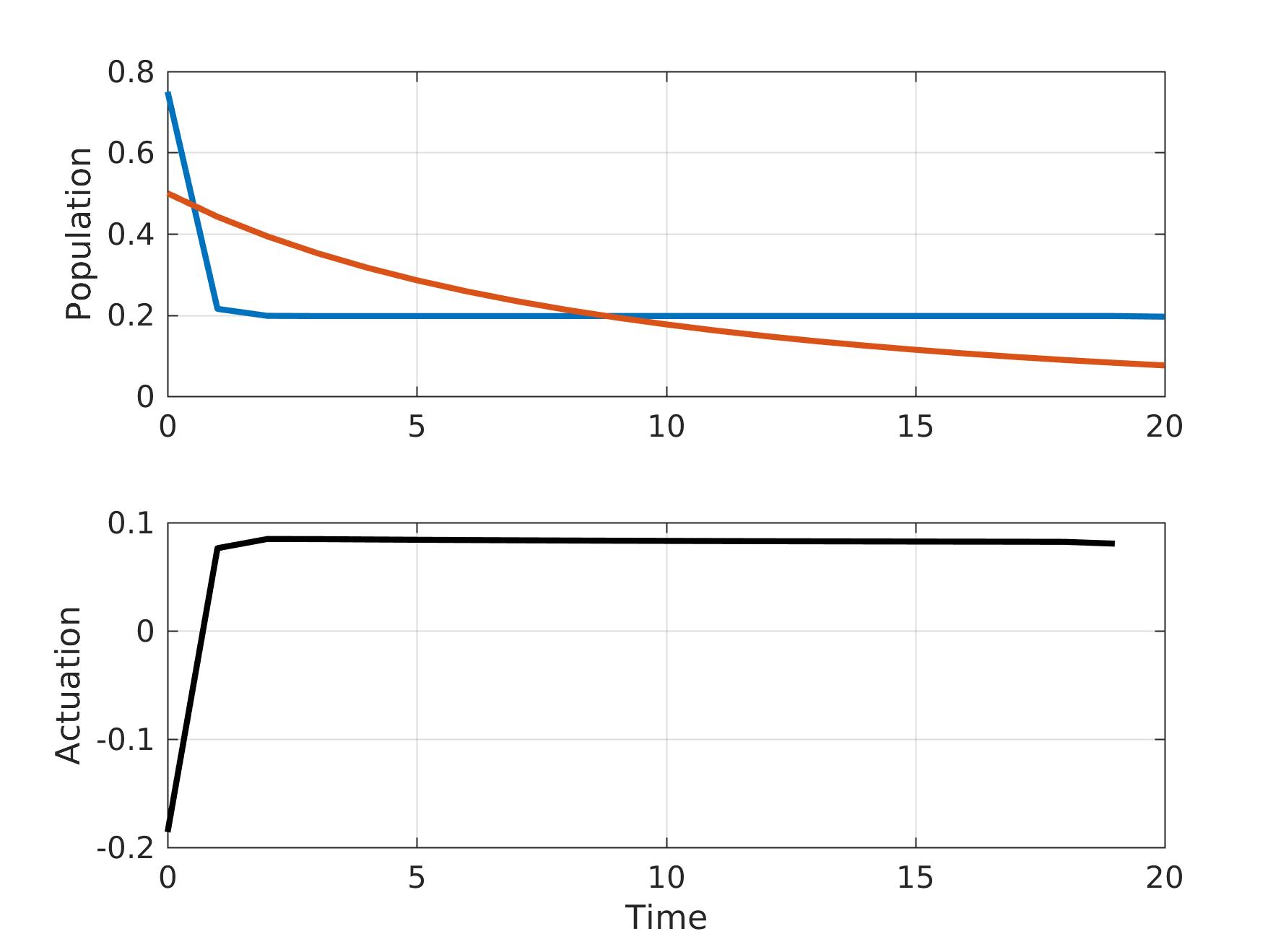
z0 = [0.75;0.5];
out = optimizer.consume(z0);
Here z0 is the initial condition, $z_0 = (x_0, y_0)$.
The optimizer returns the following structure:
p: [2×1 double]
u: [20×1 double]
n: 46
f: -8.0539
dt: '4.615292ms'
The problem in solved in 4.6ms (46 iterations).
The optimal solution is stored in out.u.
The solution is presented in the following plot:
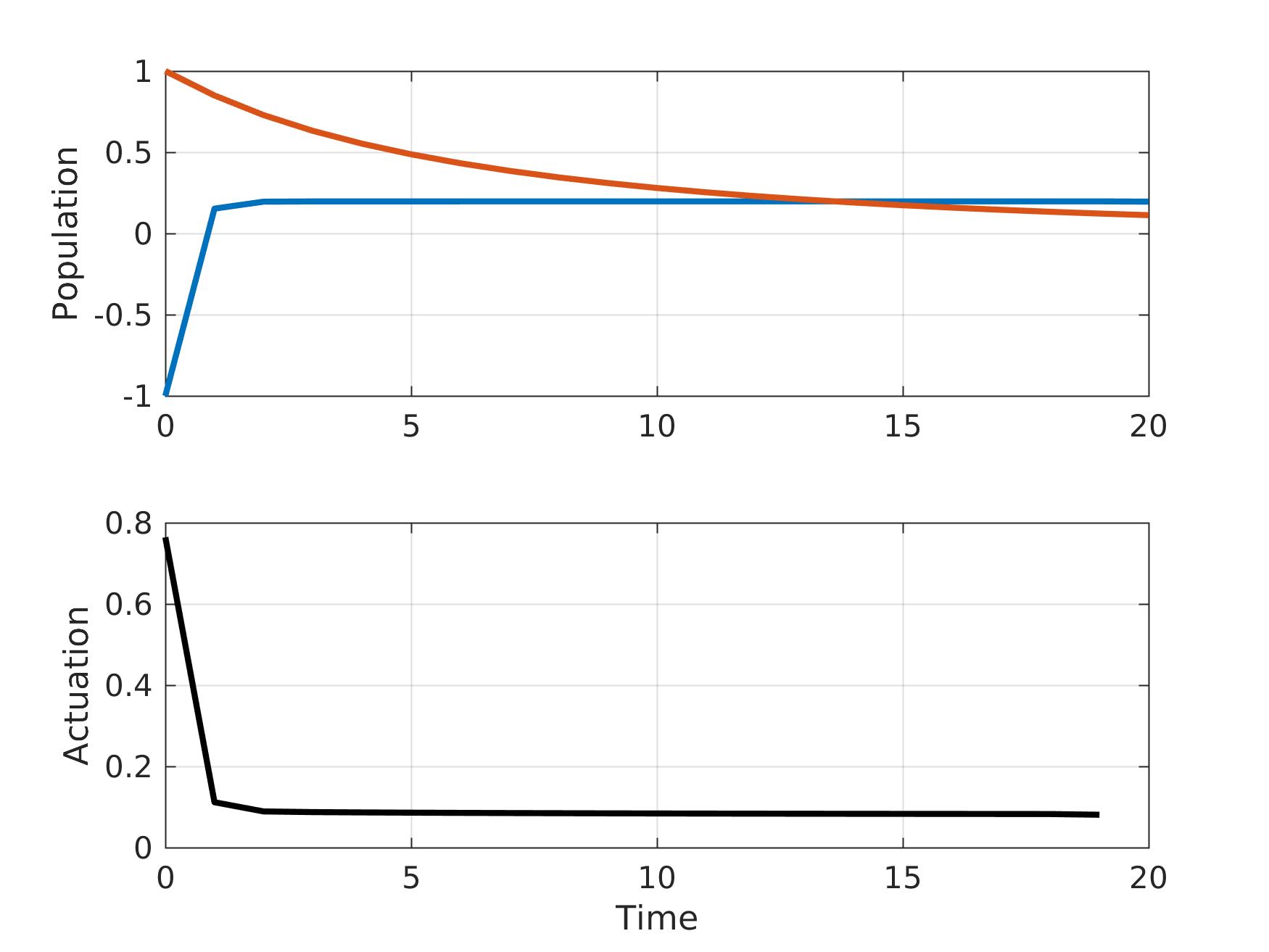
The optimizer object can be reused to solve a problem of the form (4) with a different parameter, $z_0$. For example:
z0 = [-1;1];
out = optimizer.consume(z0);
produces the following solution:
Once the optimizer is no longer needed, we should disconnect from it and kill it:
optimizer.run();
optimizer.stop();