Ball and Plate
Problem statement
Before we start
We will need to import the following libraries in Python:
import casadi.casadi as cs
import opengen as og
import matplotlib.pyplot as plt
import numpy as np
System dynamics
Consider the ball-and-beam system in the following figure
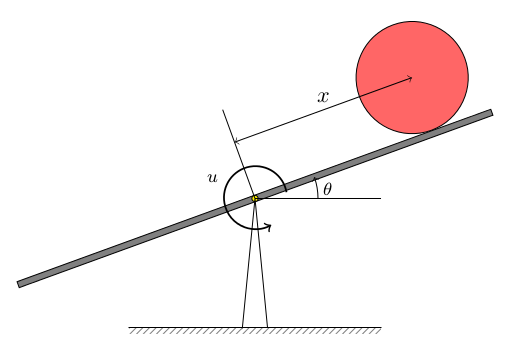
A ball of mass m is placed on a beam which is poised on a fulcrum at its middle. We can control the system by applying a torque $u$ with respect to the fulcrum point. The moment of inertia of the beam is denoted by $I$. The displacement $x$ of the ball from the midpoint can be measured with an optical sensor. The dynamical system is described by the following nonlinear differential equations
where $x_1=x$, $x_2=\dot{x}$, $x_3=\theta$ and $x_4 = \dot{\theta}$.
This is a continuous-time dynamical system of the form
mass_ball = 1
moment_inertia = 0.0005
gravity_acceleration = 9.8044
sampling_time = 0.01
nx = 4
N = 15
and the continuous-time system dynamics is
def dynamics_ct(x, u):
dx1 = x[1]
dx2 = (5/7)*(x[0] * x[3]**2 - gravity_acceleration * cs.sin(x[2]))
dx3 = x[3]
dx4 = (u - mass_ball*gravity_acceleration*x[0]*cs.cos(x[2])
- 2*mass_ball*x[0]*x[1]*x[3]) \
/ (mass_ball * x[0]**2 + moment_inertia)
return [dx1, dx2, dx3, dx4]
We may discretize the system dynamics using, for example, the Euler discretization with sampling time $T_s$, that is, the discrete-time dynamics can be approximated by
Let us write a little Python function for the discrete-time dynamics of the system
def dynamics_dt(x, u):
dx = dynamics_ct(x, u)
return [x[i] + sampling_time * dx[i] for i in range(nx)]
Nonlinear MPC problem
We shall construct a nonlinear MPC controller that drives the ball to the reference position $x_1^{\mathrm{ref}}=0$, i.e., at the reference state $x^{\mathrm{ref}}=(0,0,0,0)$ with input reference $u^{\mathrm{ref}}=0$.
To that end, let us define a state cost function $\ell(x, u)$ and a terminal cost function $\ell_N(x)$ as follows
In particular, let
def stage_cost(x, u):
cost = 5*x[0]**2 + 0.01*x[1]**2 + 0.01*x[2]**2 + 0.05*x[3]**2 + 2.2*u**2
return cost
def terminal_cost(x):
cost = 100*x[0]**2 + 50*x[2]**2 + 20*x[1]**2 + 0.8*x[3]**2
return cost
the cost parameters where selected arbitrarily.
The total cost function of the model predictive controller, along a prediction horizon $N$ will be
where $x_0$ is the given current state and $x_{t+1} = x_t + T_sf(x_t, u_t)$ as discussed above.
u_seq = cs.MX.sym("u", N) # sequence of all u's
x0 = cs.MX.sym("x0", nx) # initial state
x_t = x0
total_cost = 0
for t in range(0, N):
total_cost += stage_cost(x_t, u_seq[t]) # update cost
x_t = dynamics_dt(x_t, u_seq[t]) # update state
total_cost += terminal_cost(x_t) # terminal cost
Lastly, we will impose the following input constraints
for all $t=0,\ldots,N-1$. For that purpose, we shall define the following set
U = og.constraints.BallInf(None, 0.95)
Code generation
We may now specify the problem and generate code
problem = og.builder.Problem(u_seq, x0, total_cost) \
.with_constraints(U)
build_config = og.config.BuildConfiguration() \
.with_build_directory("python_build") \
.with_tcp_interface_config()
meta = og.config.OptimizerMeta().with_optimizer_name("ball_and_plate")
solver_config = og.config.SolverConfiguration()\
.with_tolerance(1e-6)\
.with_initial_tolerance(1e-6)
builder = og.builder.OpEnOptimizerBuilder(problem, meta,
build_config, solver_config)
builder.build()
This will generate a solver in Rust as well as a TCP server that will
listen for requests at localhost:8333 (this can be configured).
Simulations
Closed-loop trajectories
We can now easily call the auto-generated solver through its TCP socket in a few lines of code:
# Create a TCP connection manager
mng = og.tcp.OptimizerTcpManager("python_build/ball_and_plate")
# Start the TCP server
mng.start()
# Run simulations
x_state_0 = [0.1, -0.05, 0, 0.0]
simulation_steps = 2000
state_sequence = x_state_0
input_sequence = []
x = x_state_0
for k in range(simulation_steps):
solver_status = mng.call(x)
us = solver_status['solution']
u = us[0]
x_next = dynamics_dt(x, u)
state_sequence += x_next
input_sequence += [u]
x = x_next
# Thanks TCP server; we won't be needing you any more
mng.kill()
We may now plot the closed-loop trajectories using matplotlib as follows
time = np.arange(0, sampling_time*simulation_steps, sampling_time)
plt.plot(time, state_sequence[0:4*simulation_steps:4], '-', label="position")
plt.plot(time, state_sequence[2:4*simulation_steps:4], '-', label="angle")
plt.grid()
plt.ylabel('states')
plt.xlabel('Time')
plt.legend(bbox_to_anchor=(0.7, 0.85), loc='upper left', borderaxespad=0.)
plt.show()
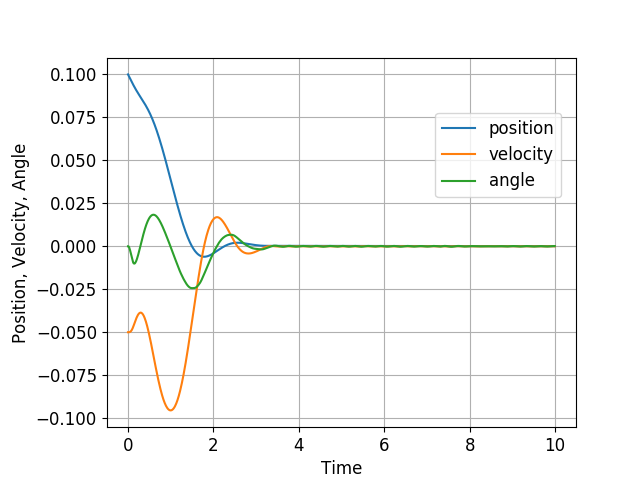
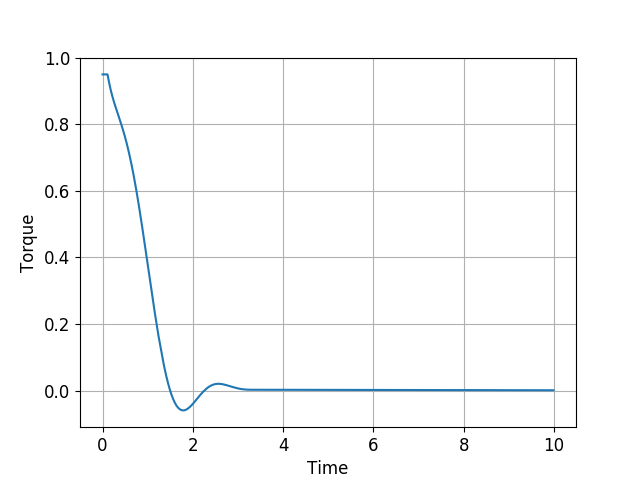
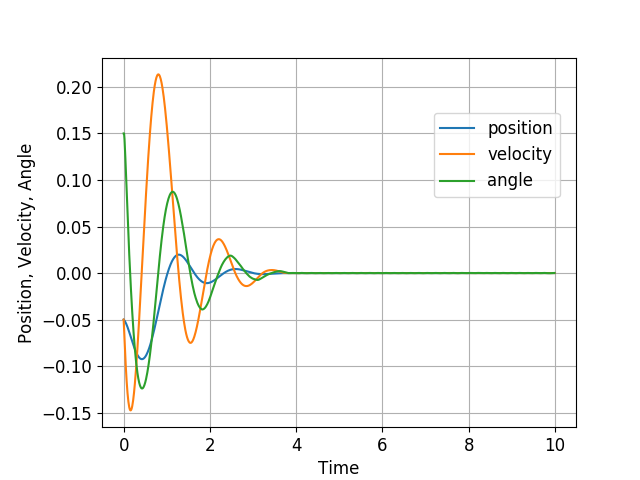
and a couple of plots from a different initial condition:
Solver statistics
In the above simulations, the average solution time is 0.35ms and the maximum time is 2.78ms.
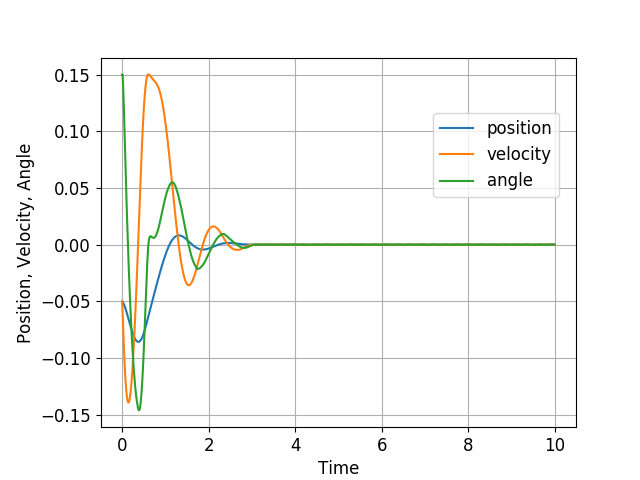
State constraints
In the second simulation scenario above, we see that the speed, $\dot{x}$, of the ball becomes larger than 0.2m/s. Let us impose the bound
We may impose this constraint using the augmented Lagrangian method with the mapping $F_1$ and the set $C$ specified below:
x_t = x0
total_cost = 0
F1 = []
for t in range(0, N):
total_cost += stage_cost(x_t, u_seq[t]) # update cost
x_t = dynamics_dt(x_t, u_seq[t]) # update state
F1 = cs.vertcat(F1, x_t[1]) # state constraint
C = og.constraints.BallInf(None, 0.15)
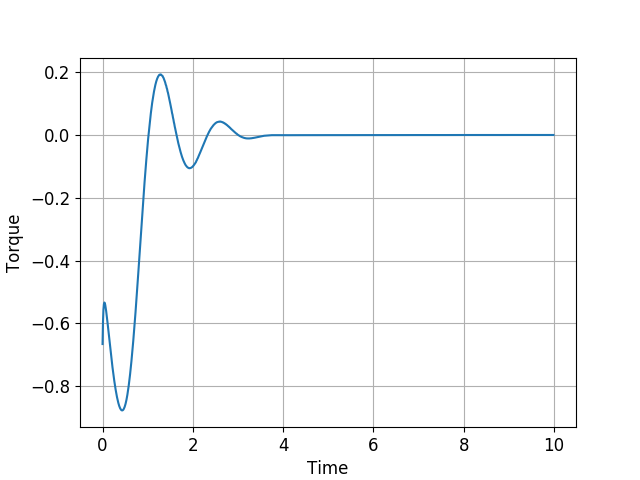
We then need to provide $F_1$ and $C$ to Problem as follows:
problem = og.builder.Problem(u_seq, x0, total_cost) \
.with_constraints(U)\
.with_aug_lagrangian_constraints(F1, C)
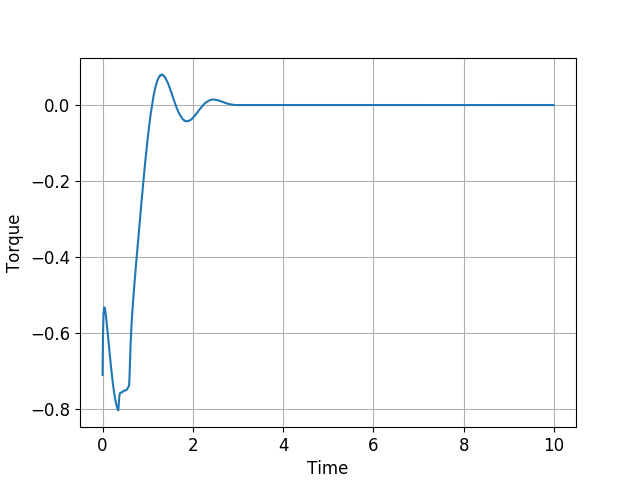
The system response is then shown below: