Inverted Pendulum
Problem statement
This example is incomplete and will be updated soon.
Before we start
We will need to import the following libraries in Python:
import casadi.casadi as cs
import opengen as og
import matplotlib.pyplot as plt
import numpy as np
System dynamics
Description coming soon....
Nonlinear MPC problem
Description coming soon....
Code generation
Code coming soon
Simulations
Description coming soon....
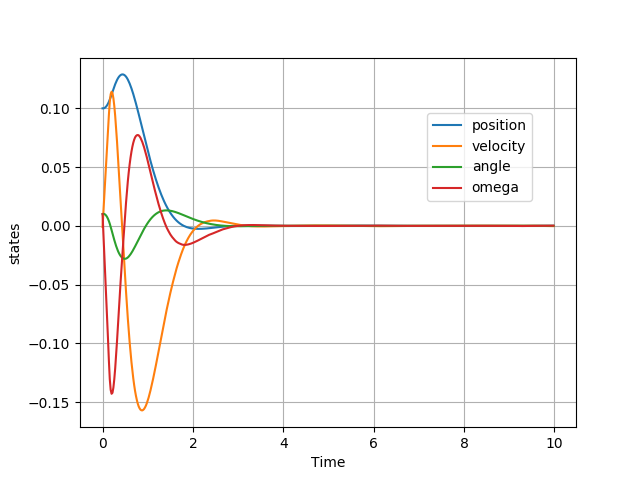
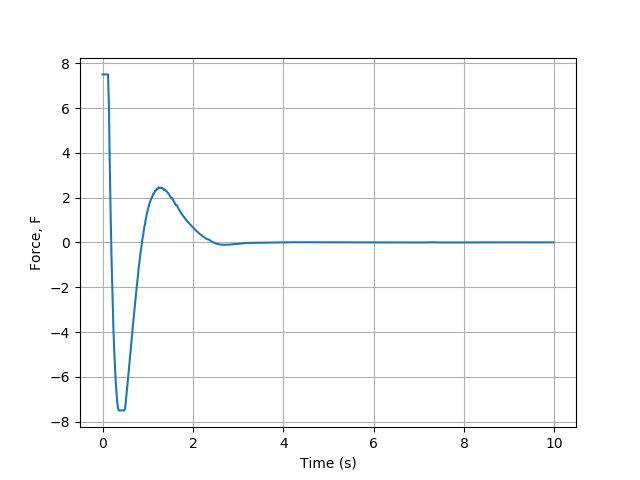
Closed-loop trajectories
Description coming soon....
Solver statistics
Description coming soon....