Nonlinear State Estimation
Problem statement
Consider a dynamical system, for simplicity, but without loss of generality without an actuation, with dynamics
where $w_t$ is an unknown disturbance signal. We are able to measure the system's output through
where $v_t$ is the measurement error.
Given a set of measurements $Y_N=(y_{0},\ldots,y_{N-1})$, our objective is to determine estimates $\hat{x}_t$ for all $t=0,\ldots,N$.
The estimation problem consists in solving the following optimization problem
By eliminating all $\hat{w}_t$ and $\hat{v}_t$, the problem becomes
The solution of this problem generates an optimal estimate
Such problems are used in moving horizon estimation with zero prior weighting.
Data Generation
Consider the Euler-discretization of the Lorenz system given by
where $t_s$ is the sampling time, $\sigma$, $\rho$ and $\beta$ are constant parameters, $x_t = (x_{1, t}, x_{2, t}, x_{3, t})$ is the system state and $w_t$ is an unknown disturbance.
The measurements are obtained via the system output $y_t \in \mathbb{R}^3$ given by
where $v_t\in\mathbb{R}^3$ in a measurement noise term.
Let us first generate output data from this system.
# Some necessary imports
# ------------------------------------
import opengen as og
import casadi.casadi as cs
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# Generate data
# ------------------------------------
(rho, sigma, beta, ts) = (28.0, 10.0, 8.0/3.0, 0.02)
nx = ny = 3
Tsim = 100
def lorenz_sys(x):
y = [sigma * (x[1] - x[0]),
x[0] * (rho - x[2]) - x[1],
x[0] * x[1] - beta * x[2]]
return y
def dynamics(x):
dx = lorenz_sys(x)
return [x[idx] + ts*dx[idx] for idx in range(nx)]
def output(x):
return [2.0*x[0], x[1]+x[2], x[2]**2/10.0-x[0]]
# Produce data
# ------------------------------------
x_data = [0.0] * (nx * Tsim)
y_data = [0.0] * (nx * Tsim)
x_data[0:nx] = [-10.0, -12.0, 27.0]
y_data[0:nx] = output(x_data[0:nx])
for i in range(Tsim-1):
w = np.random.normal(0, 1, 3)
v = np.random.normal(0, 1, 3)
x_data[(i+1)*nx:(i+2)*nx] = dynamics(x_data[i*nx:(i+1)*nx]) + 0.02*w
y_data[(i+1)*nx:(i+2)*nx] = output(x_data[(i+1)*nx:(i+2)*nx]) + 0.1*v
time = np.arange(0, ts*Tsim, ts)
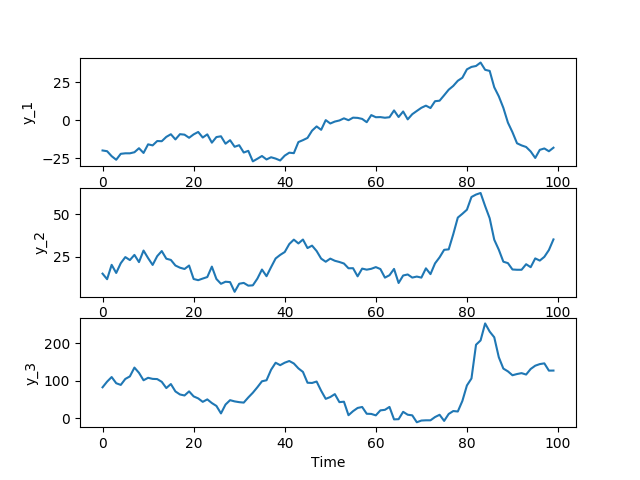
y_1 = y_data[0:ny*Tsim:ny]
y_2 = y_data[1:ny*Tsim:ny]
y_3 = y_data[2:ny*Tsim:ny]
plt.subplot(311)
plt.plot(time, y_1, '-')
plt.ylabel('y_1')
plt.subplot(312)
plt.plot(time, y_2, '-')
plt.ylabel('y_2')
plt.subplot(313)
plt.plot(time, y_3, '-')
plt.ylabel('y_3')
plt.xlabel('Time')
plt.show()
The output data are plotted below:
Code generation
def lorenz_sys_casadi(x):
y = cs.vertcat(sigma * (x[1] - x[0]),
x[0] * (rho - x[2]) - x[1],
x[0] * x[1] - beta * x[2])
return y
def dynamics_casadi(x):
dx = lorenz_sys_casadi(x)
return x + ts*dx
def output_casadi(x):
return cs.vertcat(2.0*x[0], x[1]+x[2], x[2]**2/10.0-x[0])
# Problem definition
# ----------------------------------
X_hat = cs.SX.sym('Xhat', nx*(Tsim))
Y = cs.SX.sym('Y', nx*Tsim)
V = 0.0
print(X_hat)
for i in range(Tsim-1):
w = X_hat[(i+1)*nx:(i+2)*nx] - dynamics_casadi(X_hat[i*nx:(i+1)*nx])
v = Y[i*nx:(i+1)*nx] - output_casadi(X_hat[i*nx:(i+1)*nx])
V += 20.0 * cs.dot(w, w) + 1.0 * cs.dot(v, v)
# Code generation
# ------------------------------------
problem = og.builder.Problem(X_hat, Y, V)
build_config = og.config.BuildConfiguration() \
.with_build_directory("my_optimizers") \
.with_tcp_interface_config()
meta = og.config.OptimizerMeta() \
.with_optimizer_name("estimator")
builder = og.builder.OpEnOptimizerBuilder(problem, meta, build_config)
builder.build()
The generated solver can be consumed over its TCP interface:
# Use TCP server
# ------------------------------------
mng = og.tcp.OptimizerTcpManager('my_optimizers/estimator')
mng.start()
mng.ping()
solution = mng.call(y_data)
mng.kill()
# Plot solution
x_star = solution['solution']
x_1_star = x_star[0:nx*Tsim:nx]
x_2_star = x_star[1:nx*Tsim:nx]
x_3_star = x_star[2:nx*Tsim:nx]
x_1 = x_data[0:nx*Tsim:nx]
x_2 = x_data[1:nx*Tsim:nx]
x_3 = x_data[2:nx*Tsim:nx]
fig = plt.figure()
ax = Axes3D(fig)
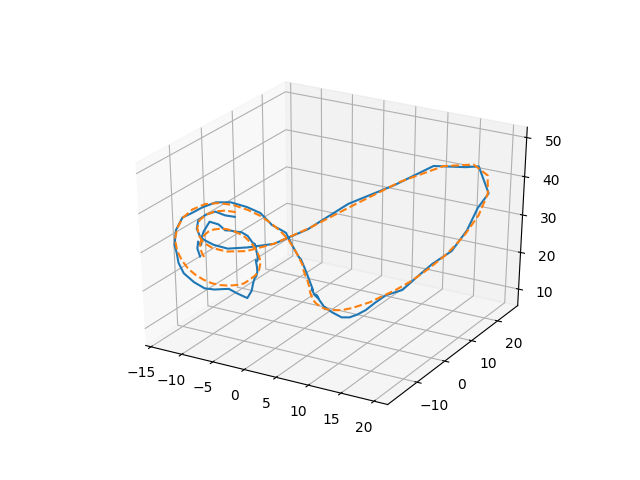
ax.plot(x_1_star,x_2_star,x_3_star)
ax.plot(x_1,x_2,x_3, '--')
plt.show()
This will generate a parametric optimizer for problem $\mathbb{P}(\mathbf{y})$ shown above that takes the system output, $\mathbf{y}$, and returns an estimate of the system state.
Such an estimation for the above randomly-generated data is shown below. The optimization problem was solved in 2.73 milliseconds (in 65 iterations).