Navigation of ground vehicle
![]()
Unobstructed navigation
Consider the navigation problem for an autonomous ground vehicle which carries a trailer as illustrated in the following figure.
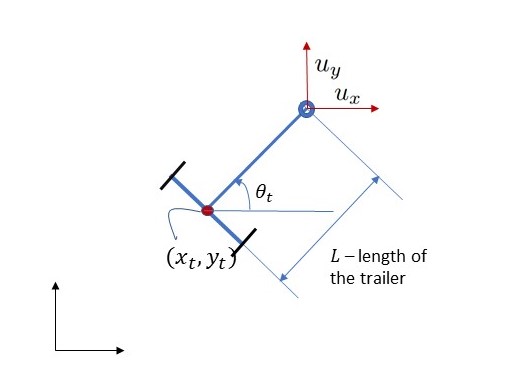
This is non-holonomic vehicle governed by the dynamical equations [Ref, Section IV]:
We want to solve the following optimal control problem
Here, z = (x, y, theta) is the position and orientation of the vehicle,
z_ref is the target position and orientation, and f describes the vehicle
dynamics, which in this example is
import opengen as og
import casadi.casadi as cs
import matplotlib.pyplot as plt
import numpy as np
# Build parametric optimizer
# ------------------------------------
(nu, nx, N, L, ts) = (2, 3, 20, 0.5, 0.1)
(xref, yref, thetaref) = (1, 1, 0)
(q, qtheta, r, qN, qthetaN) = (10, 0.1, 1, 200, 2)
u = cs.SX.sym('u', nu*N)
z0 = cs.SX.sym('z0', nx)
(x, y, theta) = (z0[0], z0[1], z0[2])
cost = 0
for t in range(0, nu*N, nu):
cost += q*((x-xref)**2 + (y-yref)**2) + qtheta*(theta-thetaref)**2
u_t = u[t:t+2]
theta_dot = (1/L) * (u_t[1] * cs.cos(theta) - u_t[0] * cs.sin(theta))
cost += r * cs.dot(u_t, u_t)
x += ts * (u_t[0] + L * cs.sin(theta) * theta_dot)
y += ts * (u_t[1] - L * cs.cos(theta) * theta_dot)
theta += ts * theta_dot
cost += qN*((x-xref)**2 + (y-yref)**2) + qthetaN*(theta-thetaref)**2
umin = [-3.0] * (nu*N)
umax = [3.0] * (nu*N)
bounds = og.constraints.Rectangle(umin, umax)
problem = og.builder.Problem(u, z0, cost).with_constraints(bounds)
build_config = og.config.BuildConfiguration()\
.with_build_directory("my_optimizers")\
.with_build_mode("debug")\
.with_tcp_interface_config()
meta = og.config.OptimizerMeta()\
.with_optimizer_name("navigation")
solver_config = og.config.SolverConfiguration()\
.with_tolerance(1e-5)
builder = og.builder.OpEnOptimizerBuilder(problem,
meta,
build_config,
solver_config)
builder.build()
We may now use the optimiser:
- TCP Interface
- Direct Interface
# Use TCP server
# ------------------------------------
mng = og.tcp.OptimizerTcpManager('my_optimizers/navigation')
mng.start()
mng.ping()
solution = mng.call([-1.0, 2.0, 0.0], initial_guess=[1.0] * (nu*N))
mng.kill()
# Plot solution
# ------------------------------------
time = np.arange(0, ts*N, ts)
u_star = solution['solution']
ux = u_star[0:nu*N:2]
uy = u_star[1:nu*N:2]
plt.subplot(211)
plt.plot(time, ux, '-o')
plt.ylabel('u_x')
plt.subplot(212)
plt.plot(time, uy, '-o')
plt.ylabel('u_y')
plt.xlabel('Time')
plt.show()
# Note: to use the direct interface you need to build using
# .with_build_python_bindings()
import sys
# Use Direct Interface
# ------------------------------------
sys.path.insert(1, './my_optimizers/navigation')
import navigation
solver = navigation.solver()
response = solver.run(p=[-1.0, 2.0, 0.0],
initial_guess=[1.0] * (nu*N))
u_star = response.get().solution
# Plot solution
# ------------------------------------
time = np.arange(0, ts*N, ts)
ux = u_star[0:nu*N:2]
uy = u_star[1:nu*N:2]
plt.subplot(211)
plt.plot(time, ux, '-o')
plt.ylabel('u_x')
plt.subplot(212)
plt.plot(time, uy, '-o')
plt.ylabel('u_y')
plt.xlabel('Time')
plt.show()
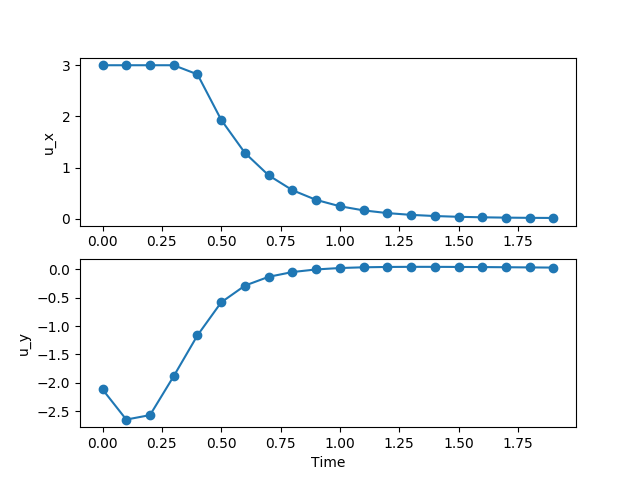
This will produce the following plot:
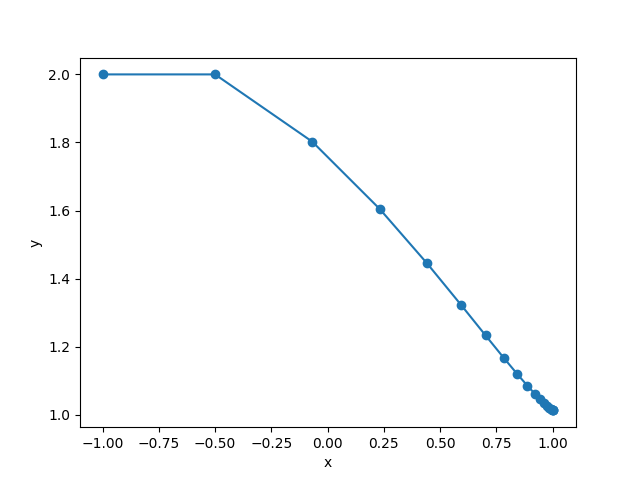
If you would like to plot the (x, y)-trajectories of the vehicle, run the following code:
# Plot trajectory
# ------------------------------------
x_states = [0.0] * (nx*(N+2))
x_states[0:nx+1] = x_init
for t in range(0, N):
u_t = u_star[t*nu:(t+1)*nu]
x = x_states[t * nx]
y = x_states[t * nx + 1]
theta = x_states[t * nx + 2]
theta_dot = (1/L) * (u_t[1] * np.cos(theta) - u_t[0] * np.sin(theta))
x_states[(t+1)*nx] = x + ts * (u_t[0] + L*np.sin(theta)*theta_dot)
x_states[(t+1)*nx+1] = y + ts * (u_t[1] - L*np.cos(theta)*theta_dot)
x_states[(t+1)*nx+2] = theta + ts*theta_dot
xx = x_states[0:nx*N:nx]
xy = x_states[1:nx*N:nx]
print(x_states)
print(xx)
plt.plot(xx, xy, '-o')
plt.show()
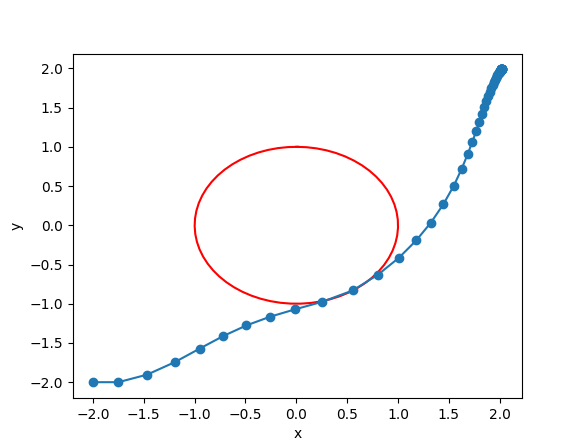
Obstructed navigation
Let us add an obstable: consider a ball centered at the origin
with radius r = 1, which needs to be avoided. To that end, we
introduce the constraint c(u; p) = 0 where
Here, z_t = (x_t, y_t) is the position of the vehicle at time t and
[z]_+ = max{0, z}.
The decision variable, as above, is u = (u_0, ..., u_{N-1})
and z_t = z_t(u).
In order to define function c in Python, we need to add one
line in the above code:
c = 0
for t in range(0, N):
cost += q*((x-xref)**2 + (y-yref)**2) + qtheta*(theta-thetaref)**2
u_t = u[t*nu:(t+1)*nu]
theta_dot = (1/L) * (u_t[1] * cs.cos(theta) - u_t[0] * cs.sin(theta))
cost += r * cs.dot(u_t, u_t)
x += ts * (u_t[0] + L * cs.sin(theta) * theta_dot)
y += ts * (u_t[1] - L * cs.cos(theta) * theta_dot)
theta += ts * theta_dot
# ADD THIS LINE:
c += cs.fmax(0, 1 - x**2 - y**2)
It makes sense to customize the solver parameters, especially
the allowed violation of the constraints (with_delta_tolerance),
the update factor for the penalty weights (with_penalty_weight_update_factor)
and the initial weights (with_initial_penalty_weights):
solver_config = og.config.SolverConfiguration()\
.with_tolerance(1e-4)\
.with_initial_tolerance(1e-4)\
.with_max_outer_iterations(5)\
.with_delta_tolerance(1e-2)\
.with_penalty_weight_update_factor(10.0)\
.with_initial_penalty_weights(100.0)
Here is a trajectory of the system with N = 60.
Update reference in real time
We may update the reference z_ref in real time. It suffices to define
p = (z_0, z_ref). In other words, we use the parameter vector p to pass to
the optimiser both the initial condition and the target.
We need to introduce the following changes. Firstly, we define the parameter vector:
p = cs.SX.sym('p', 2*nx)
(x, y, theta) = (p[0], p[1], p[2])
(xref, yref, thetaref) = (p[3], p[4], p[5])
and second update the problem definition to use p as the parameter vector:
problem = og.builder.Problem(u, p, cost).with_constraints(bounds)
Then, when we use the optimiser we to provide the vector p. For example, if z0 = (-1, 2, 0) and xref = 1, yref = 0.6, thetaref = 0.05 we use
result = solver.run(p=[-1.0, 2.0, 0.0, 1.0, 0.6, 0.05]).get()